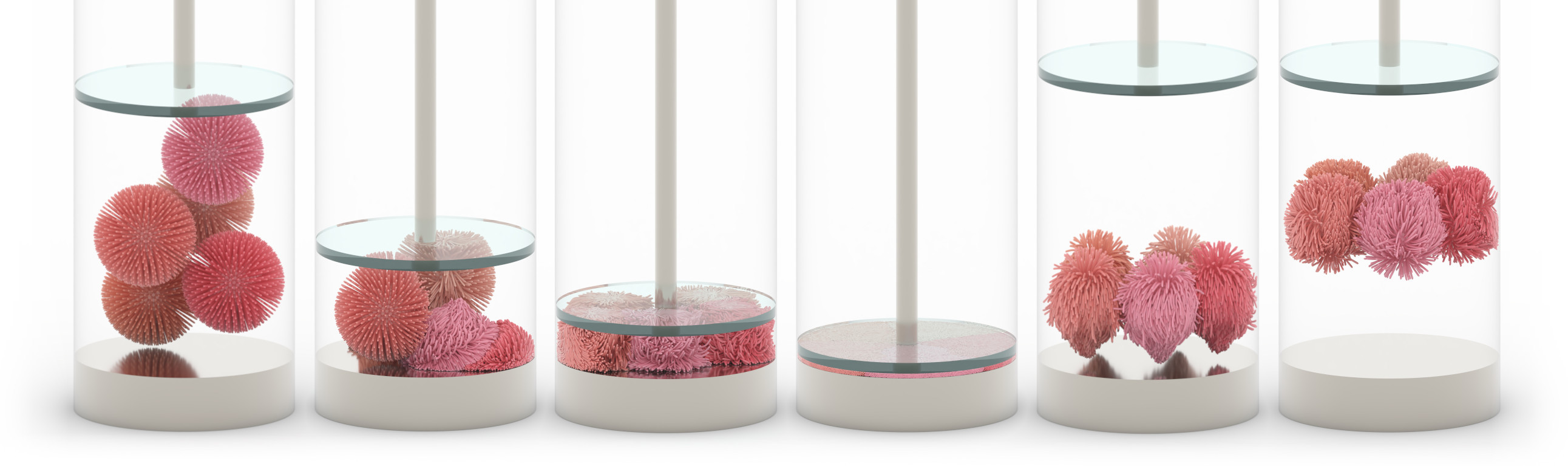
Convergence under temporal refinement
Colliding soft spheres demonstrate first-order convergence as the time step is refined against a Δt = 10-4 s reference solution.
Robust and Efficient Penetration-Free Elastodynamics without Barriers
Juntian Zheng1, Zhaofeng Luo1, Minchen Li1 2
1 Carnegie Mellon University 2 Genesis AI
ACM Transactions on Graphics, 2026 (presentation at SIGGRAPH 2026)
Code & data coming soon!
We introduce a barrier-free optimization framework for non-penetration elastodynamic simulation that matches the robustness of Incremental Potential Contact (IPC) while overcoming its two primary efficiency bottlenecks: (1) reliance on logarithmic barrier functions to enforce non-penetration constraints, which leads to ill-conditioned systems and significantly slows down the convergence of iterative linear solvers; and (2) the time-of-impact (TOI) locking issue, which restricts active-set exploration in collision-intensive scenes and requires a large number of Newton iterations. We propose a novel second-order constrained optimization framework featuring a custom augmented Lagrangian solver that avoids TOI locking by immediately incorporating all requisite contact pairs detected via CCD, enabling more efficient active-set exploration and leading to significantly fewer Newton iterations. By adaptively updating Lagrange multipliers rather than increasing penalty stiffness, our method prevents stagnation at zero TOI while maintaining a well-conditioned system. We further introduce a constraint filtering and decay mechanism to keep the active set compact and stable. A comprehensive set of experiments demonstrates the efficiency, robustness, finite-step termination, and first-order time integration accuracy of our method under a cumulative TOI-based termination criterion. With a GPU-optimized simulator design, our method achieves an up to 103x speedup over GIPC on challenging, contact-rich benchmarks - scenarios that were previously tractable only with barrier-based methods.
From rigorous validation tests to high-stress contact and solver comparisons, these experiments highlight the robustness and efficiency of our barrier-free formulation.
Colliding soft spheres demonstrate first-order convergence as the time step is refined against a Δt = 10-4 s reference solution.
Cubes on a 26.6° slope reproduce the expected frictional behavior as the coefficient varies from 0.45 to 0.55 around the sliding threshold.
For a sphere with 50k vertices, our active contact count stays near 4.3k as the radius increases, while IPC exceeds 107 contacts and runs out of memory.
A pig strikes a fixed thin plate at 100 m/s, compresses into a thin layer, and rebounds while the simulation remains penetration-free throughout.
At frame 200 with 103,946 contacts, our method advances TOI faster than GIPC and requires 4.24× fewer Newton iterations on average; solid and dashed lines show per-iteration and accumulated advances, resp.
Under extreme compression, our formulation yields condition numbers about 2 orders of magnitude smaller than IPC, with PCG averaging 63.1 iterations.
This trapped squishy-ball benchmark provides a dense-contact comparison with Cubic Barrier, where our method achieves up to 84.4× faster performance.
In this stacked-cloth case, OGC uses 30 substeps and 30 iterations per time step yet runs 4× slower and exhibits locking artifacts.
@article{zheng2026barrierfree,
author = {Zheng, Juntian and Luo, Zhaofeng and Li, Minchen},
title = {Robust and Efficient Penetration-Free Elastodynamics without Barriers},
journal = {ACM Trans. Graph.},
year = {2026},
month = apr,
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
issn = {0730-0301},
doi = {10.1145/3811035},
url = {https://doi.org/10.1145/3811035}
}